宇宙開発事業団(NASDA)提供
USERS REM R-CDH
宇宙開発事業団(NASDA)提供
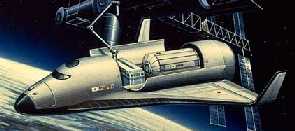
無人宇宙実験システムの往還機計画とは、宇宙の地球周回軌道上で、無人で最長半年まで実験した成果をロケットで、地球に回収しようという計画です。太平洋のある地点に着水させます。
USERS
REMはボードコンピューターとシリアル、あるいは地上とのデータ通信を行うソフトと、試験装置のソフト開発を行っています。
○USEF
無人宇宙実験システム研究開発機構
○USERS
次世代型無人宇宙実験システム
○REM リエントリーモジュール
○R−CDH
姿勢制御・制御データ処理系
総合動作
□初期フェーズ定常運用フェーズ
打ち上げ後ある時間たつと自動電源投入後、セルフチェックの実行、データ取得の開始.
この後、SEM(母船)経由テレコマンドによって、初期のシステム健全性確認が開始されるまで
1.初期立ち上げフェーズ
2.軌道制御フェーズ
□定常運用フェーズ
その後超伝導材料実験ジにG計測データをSEM経由テレメトリにより地上に送信すること、超伝導材料実験は半年以内に終了しSEM/REM分離の準備を行う.
1.バス機器チェックアウトフェーズ
2.REM実験運用フェーズ
□REM分離フェーズ
搭載機器(IMU)の起動と、DHSはREM分離に備えREM通信系を使用したテレメトリの送信の開始と姿勢計測演算を行い地上に送信.
1.REM分離準備フェーズ
2.REM分離実行フェーズ
□REM帰還フェーズ
SEM/REM分離後のREM姿勢データのモニターや再突入環境計測、READの起動、ロール角速度制御、パラシュート開傘シーケンス制御を実行.
1.軌道周回フェーズ
2.軌道離脱フェーズ
3.PM分離フェーズ
4.再突入フェーズ
| 機能 |
| ○H/K計測機能 ○SEM経由テレメトリ機能 ○SEM経由テレコマンド機能 ○電源切り替え機能 ○R−COMテレメトリ機能 ○姿勢計測演算機能 ○ロール角速度制御機能 ○G環境計測機能 ○再突入環境計測機能 ○シーケンス制御機能 ○動作モード制御機能 |
 |
| 本システムはマルチタスクOS、VXWORKS上で、動作するように開発されました. |